
Maritime RobotX Challenge is designed to foster student interest in robotic systems operating in the maritime domain, with an emphasis on the science and engineering of autonomy. The challenge will be held at Marina Bay, Republic of Singapore, from 18 to 26 on October. Three teams from the five countries, which are composed of United States, Australia, Singapore, Japan, and South Korea, will compete and demonstrate their system whose system will show the best performance in the maritime environment. This competition is organized by AUVSI Foundation and sponsored by Office of Naval Research (ONR).
Mission Tasks
Task 1 : Demonstration of Navigation and Control
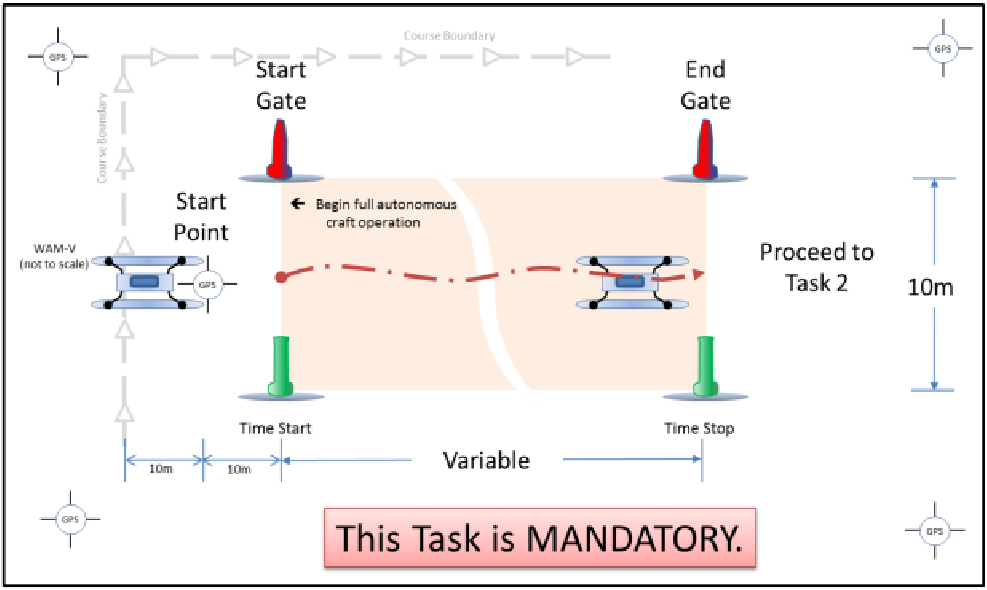
To demonstrate autonomous control of the vessel, all teams must complete this task at the start of each of their runs before continuing to other tasks. In this task the craft must maneuver autonomously along a marked course, begining at the START point, traversing a linear course marked by two sets of buoys.
Task 2 : Underwater Search and Report


In the task 2, the craft must successfully identify and locate a specific underwater device that is emitting an acoustic signal. Then, the craft should detect and report the color of a 'quadrant buoy', which is located in the center of each quadrant of the task area.
Task 3 : Identification of Symbol and Docking
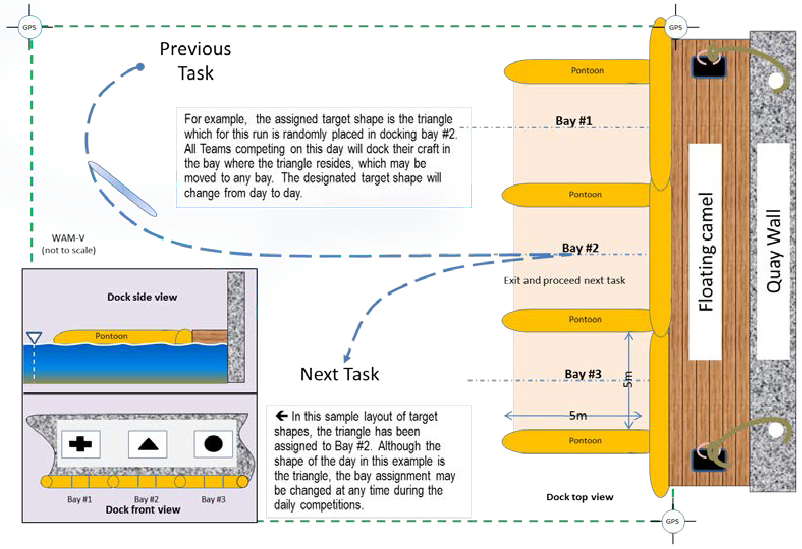
In the task 3, the craft must successfully identify one of three marked docking bays, locate it, maneuver to enter the correct bay, stop, and then maneuver to exit the bay, subsequently moving on to the next task. The arrangement of symbol will be random.
Task 4 : Light Tower Observation and Report

In this Task, the USV will be required to conduct observation of a 'light buoy' to determine the sequential light pattern it flashes. The USV must autonomously report the color sequence of the buoy's flashing light.
Task 5 : Obstacle Detection and Avoidance

In this Task, the craft must navigate through a designated ENTRY GATE(1, 2, or 3), travel autonomously through an arrangement (or field) of various floating, but stationary obstacles, and complete the course by passing through the designated EXIT GATE (X, Y, or Z). The objective is to traverse the course passing the corrent ENTRY and EXIT GATES, avoiding completely all obstacles and gates.